
The Best in Myoelectric Technology
Complete Control Gen2 is Coapt’s best in class pattern recognition intent decoding technology for upper limb prosthesis wearers. Gen2 is an add-on controller kit that offers unprecedented intuitiveness and makes prosthesis use more natural for patient lifestyles.
Pattern Recognition: 2nd Generation
The best in add-on prosthetics technology, pattern recognition is where the world of machine learning meets myoelectric intent decoding technology. These powerful algorithms were under development for decades until 2013 when Coapt introduced the first system for upper limb prosthetics. Revolution has happened once more as Coapt’s 2nd generation offering brings a higher caliber of pattern recognition technology—redefining its capabilities and benefits.
Compatibility
Whether your upper limb prosthetic users are searching for their first prosthesis or already have a trusted prosthetic limb technology, Coapt’s pattern recognition technology can be added to provide significant functional benefit. Complete Control is easily incorporated, and readily compatible with virtually every prosthetic arm and hand components on the market today.
Artificial Intelligence
New with Coapt’s Gen2® system, the Control Coach® Artificial Intelligence companion analyzes and evaluates how the users are personalizing their own intent decoding. Control Coach® is like sending the Coapt clinical expertise home with the user–providing quick and routine guidance to make sure they are getting the best function out of their artificial limb technology at all times. Use Control Coach® with the Control Companion® iOS and Android mobile apps.
Intuitive Intent Decoding
Myoelectric arm technology with the add-on Coapt pattern recognition technology learns users’ unique and natural movement intentions—they’re no longer held back by the limitations and shortcomings of single- or dual-site myoelectric control. Prosthetic arm use becomes more natural, personalizable, and straightforward with Coapt Complete Control Gen2 as it learns and adapts to decode the intent signals of the wearer.

Prosthetic command evolved
For too long, powered upper limb prosthesis users have been stuck with outdated myoelectric control. Users have been limited to using a constrained body language, switches, and triggers to get basic use out of their prostheses. Fast forward to Coapt where we’ve evolved modern myoelectric intent decoding via pattern recognition machine learning. A myoelectric system that instead learns the intuitive actions from its user, putting them in complete command of their own prosthesis function.
Upper limb difference or amputation no longer equates to being stuck with poor prosthesis function Through extensive clinical development, user testing, and relevant practitioner studies, we have lifted the old limits on upper limb myoelectric prosthesis command—creating a more intuitive, user-friendly experience that results in greater independence and enhanced function.

The power of advanced pattern recognition
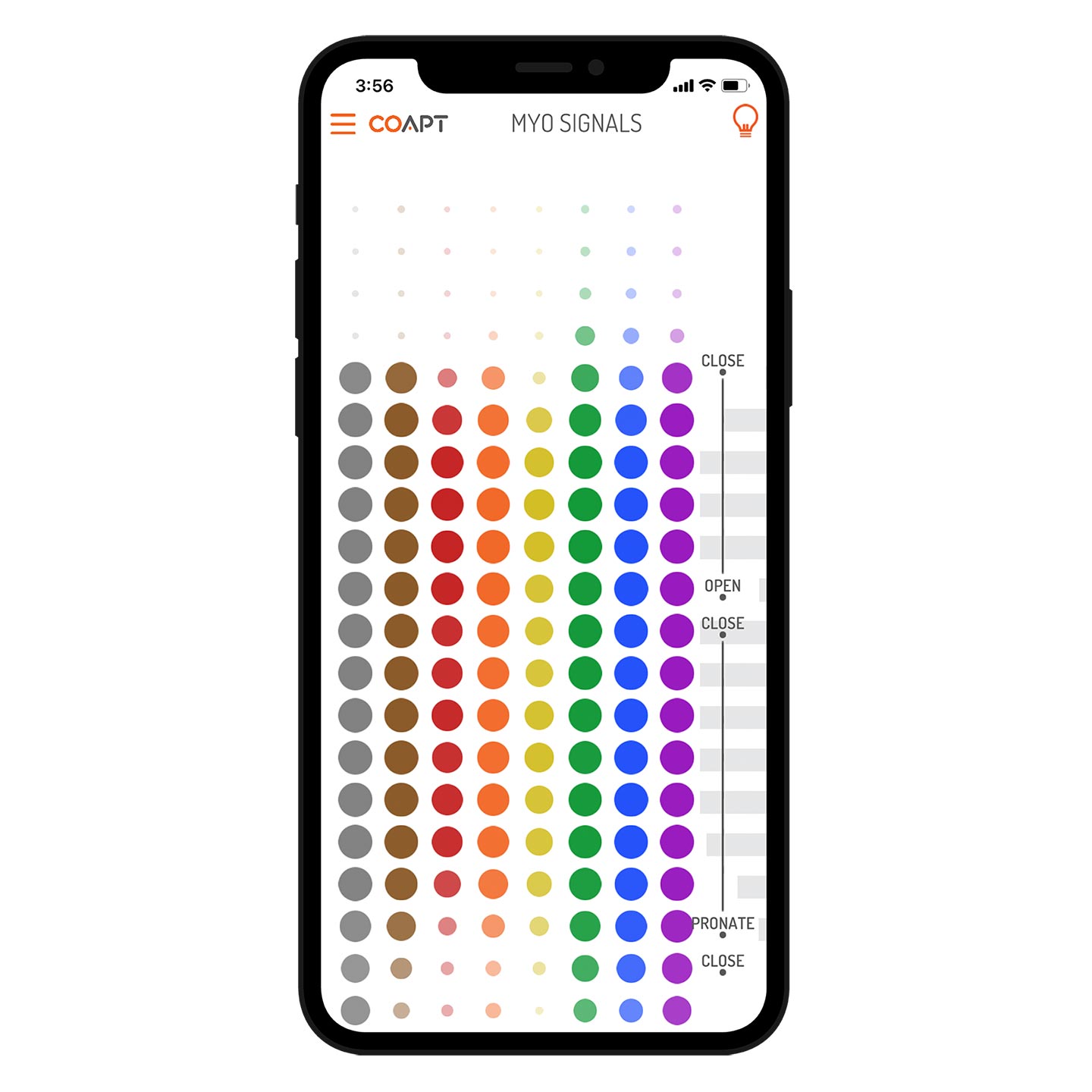
Just like our fingerprints or the iris of our eyes, muscle signal patterns for different arm and hand movements are unique to each of us. Pattern recognition is what decodes these intention patterns for upper limb different or acquired amputees into unprecedented prosthesis command.
More personal than ever before
Whether you have an acquired amputation or are someone with lifelong limb difference, you know what comes naturally to you. Coapt’s Complete Control pattern recognition intent decoding technology is a system that gets built into your myoelectric prosthesis and enables more natural, intuitive command of the prosthesis. It uses modern machine learning techniques to learn and decode your personal muscle patterns and easily translates those into prosthesis movement commands, just the way you intend. It enables you to enjoy all the benefits of your prosthesis with greater ease and convenience.
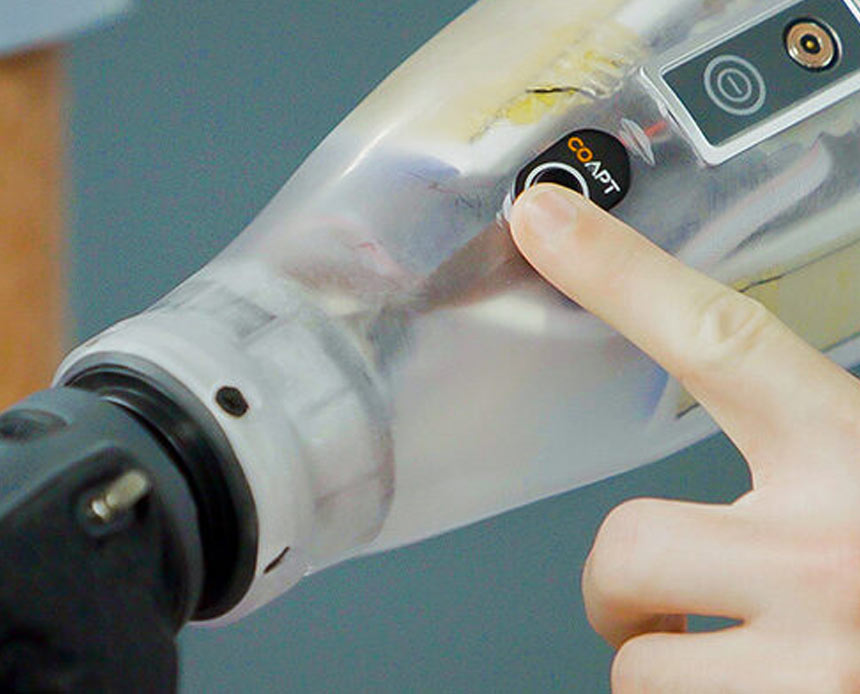
With one push of a button
Using your Coapt-enabled prosthesis is as simple as pressing a button. The Coapt button is your key to unlocking personalized command of your bionic limbs. It lets you quickly calibrate—a less-than-a-minute process where you follow along with actions of the arm—any place and at any time you feel like adjusting and improving function with your prosthesis.
No longer any need to take the arm off and put it back on in times of trouble and no need to take any more time away from your day to have intuitive function.

Power and convenience of our mobile app
Want an even better experience with your Coapt pattern recognition intent decoder? Wirelessly connect to the Coapt Control Companion® mobile app to make use of features like the Control Coach® assistant, Adaptive Advance™ controls, personalizing one movement at a time, saving your calibrations for later use, and more.
Use Control Coach® with Coapt’s moblie app Control Companion® for iOS and Android.
Reclaim your independence
Coapt Complete Control is more than just great prosthesis control. It’s about freeing you for better function and more possibilities. This system is designed with your independence in mind, built around modern, advanced technology that takes care of the complex algorithms in the background and lets you focus on the activities of your day. Fewer appointments and control tune-ups with your clinician opens you up to more independence in prosthesis use.
